

ジッタ解析に関する翻訳で、First-order PLL、Second-order PLL(1次PLL、2次PLL)という言葉がよく出てくる(例えば、ジッタ解析のp5)。
PLLとは、外部からの入力信号(基準信号)と同期した(位相差がゼロの)出力信号を生成するための回路である。PLLの動作は、以下のように表わすことができる。
(1) PLLへの入力信号(基準信号)をA1cos(ωt+φ_in(t))、PLLからの出力信号をA2cos(ωt+φ_out(t))とする。
(2) これらの信号が位相比較器(ミキサなどの掛け算回路)に入力され、誤差信号として位相比較器から
v_detector(t)=(K_detector・A1・A2/2)sin(φ_in(t)-φ_out(t))、K_detectorは位相比較器の利得
≒(K_detector・A1・A2/2)(φ_in(t)-φ_out(t))、φ_in(t)-φ_out(t)<<1の場合
=(K_detector・A1・A2/2)φ_error(t)、φ_error(t)=φ_in(t)-φ_out(t)は位相差
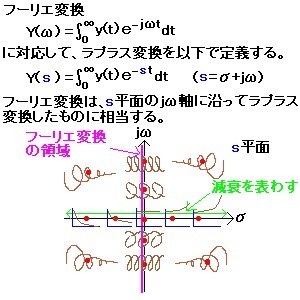
が出力される。この式の両辺をラプラス変換すると(時間領域の信号表現をs領域の信号表現に変換すると)、
v_detector(s)≒K_detector・φ_error(s)
となる。
(3) このv_detector(s)が、伝達関数がF(s)のループフィルターを通るので、その出力v_filterは、
v_filter(s)=F(s)・v_detector(s)
となる。
(4) v_filter(s)が電圧制御発振器(VCO)に入力され、その出力がフィードバックされて、再度位相比較器に入力される。
VCOは、VCOへの入力信号電圧v_filter(t)に応じてVCOの出力信号の周波数ω_vco_out(t)を可変するデバイスなので、
ω_vco_out(t)=ω_c+K_vco・v_filter(t)、ω_cは中心周波数、K_vcoはVCOの利得
と表わすことができる。周波数ωは位相φの変化率(時間微分)なので(ω(t)=dφ(t)/dtなので)、VCOの出力信号の位相φ_vco_out(t)は、ω_vco_out(t)を積分して、
φ_vco_out(t)=∫ω_vco_out(t)dt=ω_c・t+K_vco∫v_filter(t)dt
となる。したがって、VCOの出力信号電圧V_vco_out(t)は、
V_vco_out(t)=A0cos(φ_vco_out(t))=A0cos(ω_c・t+K_vco∫v_filter(t)dt)
となる。
この信号がPLLの出力信号であり、また、フィードバックされて、再度位相比較器の入力信号にもなる。この信号の初期位相K_vco∫v_filter(t)dtを、
φ_out(t)=K_vco∫v_filter(t)dt
と表し、両辺をラスラス変換すると、
φ_out(s)=K_vco(v_filter(s)/s)
となる。
以上の(1)~(4)をまとめると、PLLに、初期位相φ_in(t)の基準信号が入力されると、最初に位相比較器で初期位相φ_out(t)のフィードバック信号との位相差に比例する信号v_detector(t)が生成され(v_detector(s)≒K_detector・φ_error(s))、その信号が伝達関数がF(s)のループフィルターを通り(v_filter(s)=F(s)・v_detector(s))、その電圧v_filter(t)に応じてVCOから初期位相φ_out(s)=K_vco(v_filter(s)/s)の信号が出力され、その初期位相φ_out(t)の信号がPLLの出力信号となるのと同時に、再度位相比較器にフィードバックされ、ループすることにより(基準信号の初期位相φ_in(t)との差(φ_in(t)-φ_out(t))がゼロに近づき)位相同期が行われる。
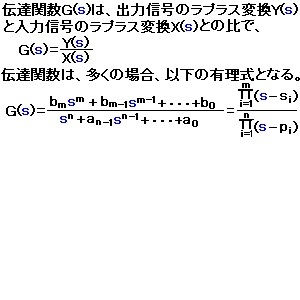
ここで、入力がX(s)、出力がY(s)、順方向経路の伝達関数(ゲイン)がP_forward(s)、フィードバック経路の伝達関数(ゲイン)がP_feedback(s)の典型的なフィードバック制御系の閉ループ伝達関数H(s)は
H(s)=Y(s)/X(s)=P_forward(s)/(1+P_forward(s)・P_feedback(s))
である。
上で説明したPLLにこれを適用すると、順方向経路の伝達関数(ゲイン)は、位相比較器の利得(K_detector)、ループフィルターの伝達関数F(s)、VCOの利得(K_vco)、VCOでの積分演算(1/s)を掛けたもので、
P_forward(s)=K_detector・F(s)・K_vco・(1/s)
で与えられ、フィードバック経路には何もないのでその伝達関数(ゲイン)は、
P_feedback(s)=1
で与えられるので、PLLの閉ループ伝達関数H(s)は
H(s)=φ_out(s)/φ_in(s)=K・F(s)/(s+K・F(s))、K=K_detector・K_vco
となる。
ループフィルターがない場合は、F(s)=1なので、
H(s)=K/(s+K)
となる。この場合、分母がsの1次式なので、1次のPLLと呼ばれる。
ループフィルターが、CRフィルターの場合は、時定数T=RCを用いて、F(S)=1/(1+sT)と表されるので、
H(s)=K/(s(1+sT))
となる。この場合、分母がsの2次式なので、2次のPLLと呼ばれる。
1次のPLL、2次のPLLについては、以下を参照。